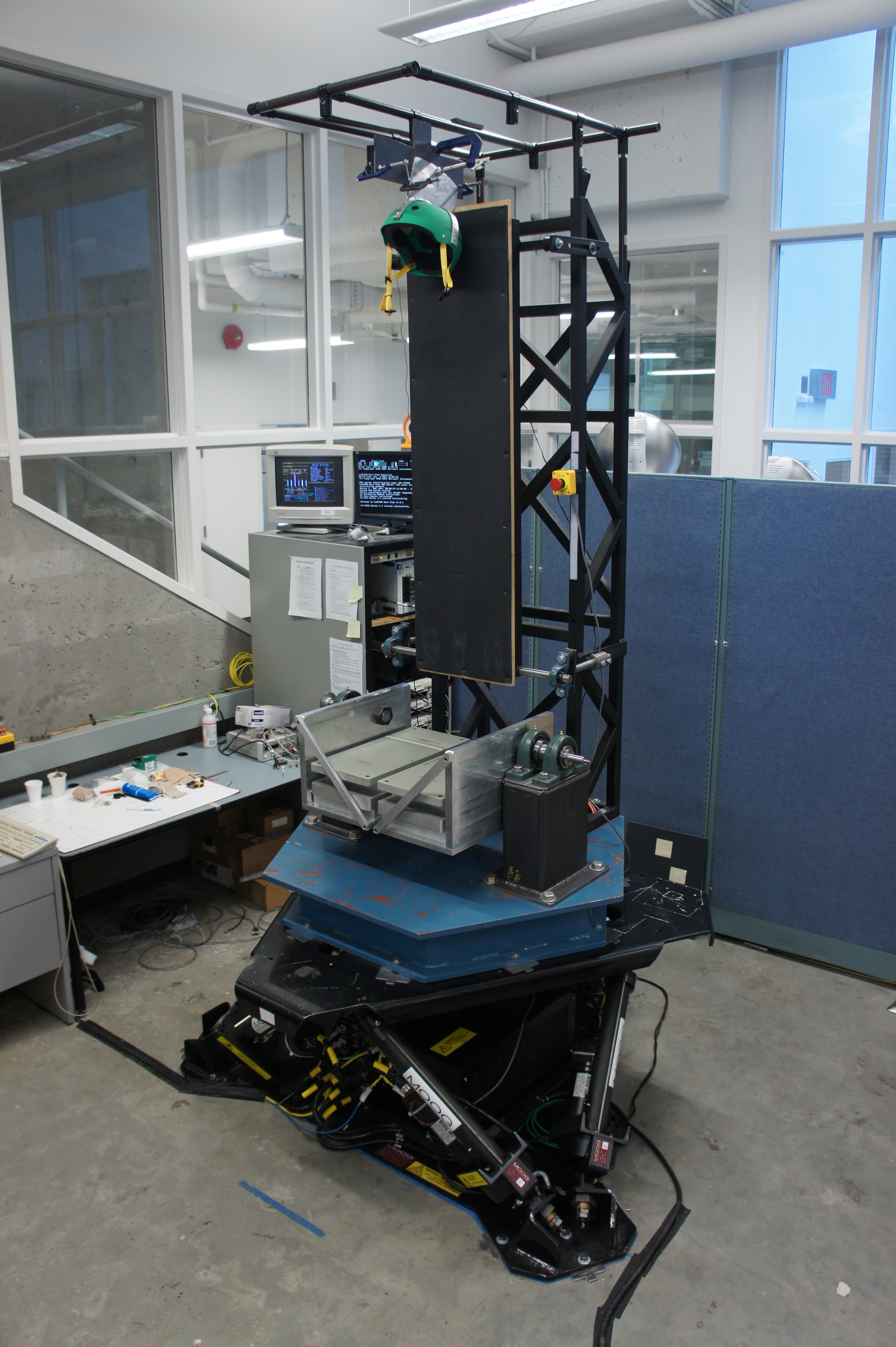
 For healthy persons, maintaining standing balance seems effortless and appears to be automatic or “involuntary”. The control of standing balance may be compromised in persons with various pathologies (e.g. spinal cord injury, stroke or diabetes mellitus) or may slowly deteriorate during normal aging. Rehabilitation robotics tools have been developed to retrain locomotor, or voluntary movements, yet no methods have focused successfully on rehabilitating the control of standing balance.We aim to develop and validate accurate mechanical and physiological models of standing balance that will ultimately allow retraining of a person’s ability to maintain standing balance. To achieve this goal, we developed a novel robotic motion platform – RISER: Robot for Interactive Sensory Engagement and Rehabilitation – that allows us to investigate the human balance system in a safe, systematic and controlled manner. The RISER system allows us to manipulate and examine the relationships between the sensory inputs and locomotor outputs of a person’s standing balance control system. Inputs include vestibular sense, vision, and proprioception, while outputs include the orientation of body segments.
For healthy persons, maintaining standing balance seems effortless and appears to be automatic or “involuntary”. The control of standing balance may be compromised in persons with various pathologies (e.g. spinal cord injury, stroke or diabetes mellitus) or may slowly deteriorate during normal aging. Rehabilitation robotics tools have been developed to retrain locomotor, or voluntary movements, yet no methods have focused successfully on rehabilitating the control of standing balance.We aim to develop and validate accurate mechanical and physiological models of standing balance that will ultimately allow retraining of a person’s ability to maintain standing balance. To achieve this goal, we developed a novel robotic motion platform – RISER: Robot for Interactive Sensory Engagement and Rehabilitation – that allows us to investigate the human balance system in a safe, systematic and controlled manner. The RISER system allows us to manipulate and examine the relationships between the sensory inputs and locomotor outputs of a person’s standing balance control system. Inputs include vestibular sense, vision, and proprioception, while outputs include the orientation of body segments.
We plan to develop RISER into a new rehabilitation tool for retraining balance in persons suffering from a range of pathologies including incomplete spinal cord injury. RISER II has begun development at the Sensorimotor Physiology Lab with Professor Blouin!
Researchers
Dr. Calvin Kuo, Post-doctorate Fellow, School of Kinesiology, UBC
Collaborators
Dr. Jean-Sébastien Blouin, Associate Professor, School of Kinesiology, UBC
Dr. Elizabeth Croft, Professor, Department of Mechanical Engineering, UBC
Dr. Mike Van der Loos, Associate Professor, Department of Mechanical Engineering, UBC

